In robotics, local planning is the part of route planning that deals with small scale navigation including obstacle avoidance or navigating through doorways or corridors. It is in contrast with global planning which is about finding the best overall route, but ignores small details.
Used in Chap. 15: pages 221, 226, 234, 235
Used in glossary entries: global planning, obstacle avoidance, robotics, route planning
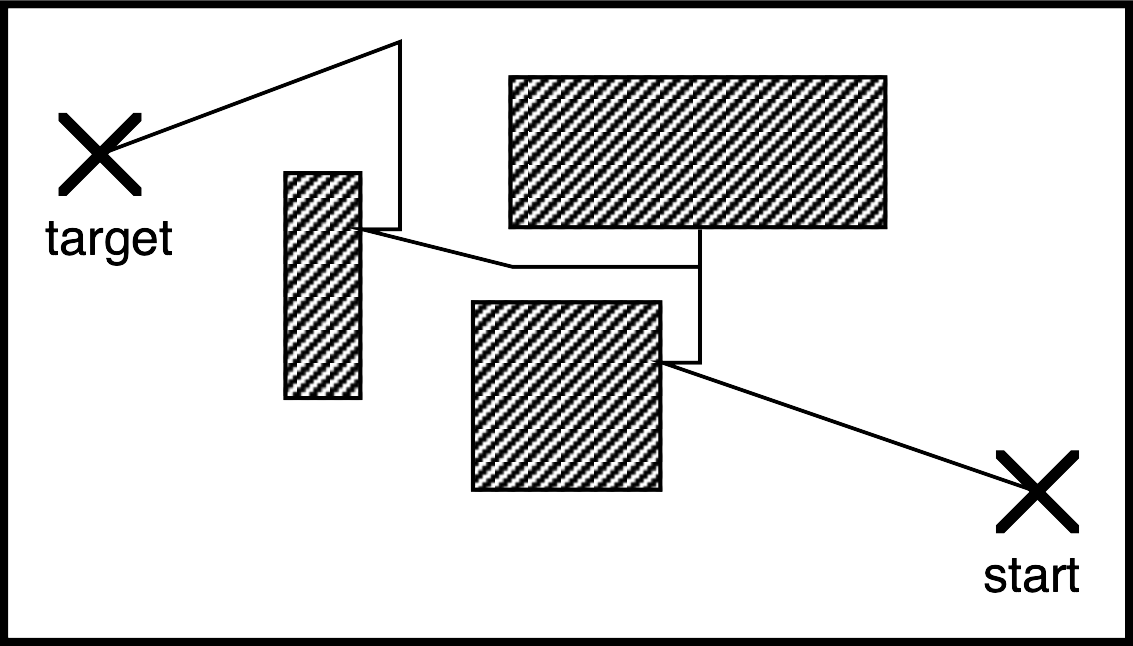
Local planning to avoid obstacles